
Avec plus d’un milliard de dollars investis dans des startups, plus d’une centaine de projets d’aéronefs bigarrés ayant pour vocation à devenir des drones de passagers autonomes électriques, des projets équivalents lancés par les grands industriels de l’aviation Boeing, Airbus et Bell Helicopter et des présentations statiques dans de nombreux salons, la vague des drones de passagers a tout l’air d’une grosse bulle.
A quoi ressemble une bulle ? A un engouement entrepreneurial générant une sur-multitude de projets dont très peu survivront, testant des formules encore très incertaines sur un marché qui n’existe pas encore et qui pourrait ne jamais exister à grande échelle. Elle peut s’accompagner d’une surabondance de financements aboutissant à des valorisations non justifiées de startups voire d’entreprises établies en bourse, surtout au Nasdaq.
Mais comme l’a illustrée l’explosion de la bulle Internet de 2000/2001, ce n’est pas une raison pour considérer que “cela ne marchera jamais”. Il faut fouiller un peu pour identifier les projets viables et surtout les critères de leur succès. C’est ce que je vais examiner dans cet article qui reprend et complète une partie des éléments sur le sujet que j’avais publiés dans le Rapport du CES 2019, pages 232 à 240.
On peut trouver que j’utilise abusivement l’expression de drone de passager dans cet article. En effet, par définition d’origine, un drone est autonome et sans passager. Mais l’appellation de “drone de passager” est maintenant d’usage courant comme l’indique Wikipedia dans la page associée. Elle est plus facile à retenir que les notions techniques d’UAV (Unmanned Aerial Vehicules) ou VTOL (Vertical Take-Off and Landing). Bref, que les puristes ne m’en tiennent pas trop rigueur !
La sémantique des aéronefs présentés dans cet article est variée. Nombre des appareils cités seront initialement pilotés manuellement au début avant de passer à un mode autonome. En phases de tests, il s’agira d’appareils pilotés à distance et sans passagers (donc, vraiment des drones), avant qu’ils embarquent un pilote, puis des passagers, puis enfin des passagers sans pilote. Et d’autres aéronefs évoqués ressemblent plus à des avions qu’à des drones hélicoptères sans compter la curieuse variété des voitures volantes.
Le ludion du CES
Le CES est juste un ludion de ce phénomène. Il marque une montée anecdotique du nombre d’exposants présentant des prototypes de drones de passagers ou engins volants divers. Le premier en date était le Chinois eHang avec son modèle 184, présenté en mode statique aux CES 2016 et 2017. En 2018, c’était au tour de Velocopter de faire une démonstration en vol lors du keynote d’Intel, puis Workhorse Group de présenter son prototype Surefly en statique en extérieur, et enfin, de Bell Helicopter qui présentait l’habitacle d’un futur drone conçu avec Uber.

En 2019, Bell Helicopter récidivait avec une maquette complète de ce drone. Ce VTOL (vertical take off and landing) existera dans une version batterie et une version alimentée par une turbine à gaz du Français Safran (issues de Safran Helicopter Engines, ex Turbomeca) et une avionique développée par Thalès. Bell Helicopter est une filiale de l’Américain Textron qui possède aussi les avions Cessna. Elle est à l’origine du fameux Boing-Bell Osprey V22 à décollage vertical et vol horizontal. Trois engins plus anecdotiques servant à transporter une seule personne étaient aussi présentés au CES 2019 : l’Electrafly et deux Hoverbike. Il ne s’agit pas du tout de drones au sens littéral du terme mais d’engins volants personnels plutôt dédiés à des casse-cous professionnels.
Au Mondial de l’Auto de Paris en octobre 2018, j’avais aussi découvert le Flutr (Allemagne) qui n’était alors qu’à l’état de prototype (site) et semble toujours l’être six mois après.
")
L’investissement dans les drones de passagers
Les plus gros investissements sont allés chez Lilium (2014, Allemagne, $102M), Joby (2009, USA, $131M), Kitty Hawk (2015, USA, $100M), eHang (Chine $60M, qui a testé ses premiers vols avec passagers sur de courtes distances en 2018, vidéo) et Volocopter (2012, Allemagne, $30M). Boeing s’y est mis et a fait décoller son premier VTOL électrique développé par Aurora Flight Sciences fin janvier 2019 (vidéo). Ces financements sont là mais restent très sélectifs, un grand nombre des projets cités plus loin ont été très chichement financés.
Cette présentation The Electric VTOL Revolution, août 2018 (55 slides et version de 109 slides) fait un bel inventaire de ces projets d’avions ou hélicoptères électriques et autres drones dont je me suis inspiré pour faire l’inventaire intégré dans le Rapport du CES 2019. Ces projets proviennent d’un grand nombre de pays : USA, Royaume-Uni, Japon, Vietnam et même France, pour ce qui est d’Airbus. La créativité est sans limite. Il existe même des projets à base de blockchain pour réserver son vol (exemple).

Les formes de ces aéronefs sont très variées. La classification ci-dessus comprend cinq types d’engins :
- Lift + cruise : des engins qui décollent verticalement et volent horizontalement avec une propulsion séparée pour ces deux fonctions (12 projets identifiés).
- Les vectored thrusts engines qui utilisent des hélices en nombre plus ou moins grand orientables pour le décollage et le vol (46 projets).
- Les hélicoptères électriques à plusieurs passagers (4 projets).
- Les wingless, qui sont des variantes des précédents (25 projets).
- Les hoverbikes ou hélicoptères personnels (22 projets).
Reste à y caser les voitures volantes qui peuvent utiliser divers moyens de propulsion pour décoller !

Dans le détail, la classification de ces projets peut emprunter des critères multiples : le nombre de passagers, l’autonomie et le rayon d’action, le mode de décollage, les infrastructures associées, la propulsion électrique ou hybride (avec un générateur d’électricité fonctionnant avec du kérosène), le nombre d’hélices, l’encombrement, la géométrie variable, le bruit et la solidité.

Ces projets sont incroyablement nombreux. Est-ce un phénomène si nouveau que cela quand on connaît la créativité humaine débridée dans les moyens de transport routiers et aériens depuis plus d’un siècle ? Pas tant que cela, si ce n’est la forme “startupienne” que prennent nombre de ces projets.
Cela rappelle en tout cas le film “Ces merveilleux fous volants dans de drôles de machines !” qui date de 1965 (Those Magnificent Men in Their Flying Machines!, bande annonce) et, bien évidemment, la spectaculaire course de pod racers de Star Wars I – The Phantom Menace qui fête ses 20 ans en 2019 et qui a fait les choux gras de Lego dans la hotte du Père Noël. Bien qu’il ne s’agisse bien évidemment pas de grands chefs d’œuvre du cinéma, ils ont probablement inspiré quelques créateurs de startups de ce secteur très créatif. On peut y ajouter les innombrables films de science-fiction intégrant des taxis volants de Blade Runner (1982) au Cinquième Elément (1997) sans compter la voiture volante de Scaramanga dans l’Homme au Pistolet d’Or (1974).

Depuis les débuts de l’hélicoptère dans les années 1930, les inventeurs de tout poil se sont succédé de décennies en décennies pour créer de bien drôles de machines. Voir par exemple cette tentative de décollage vertical en 1967 (vidéo) d’un Nord Aviation N 500 Cadet. En pratique, très peu de ces aéronefs sont devenus opérationnels, et ceux qui ont atteint ce stade ont connu un bon nombre d‘accidents en exploitation comme les Harrier et les Osprey V-22. On attend de voir ce qu’il en sera du récent Lockheed-Martin F-35B qui décolle quasiment verticalement.
Bénéfices des drones de passagers
Comment évaluer ces différents projets avec un regard critique documenté ? Commençons par les bénéfices apportés par ces différents moyens de transports de passagers.
Motorisation électrique
La motorisation électrique est le point commun de toutes ces classes d’aéronefs. Elle permet de réduire le bruit pour élargir les plages horaires et zones desservies, réduire en théorie la pollution et enfin les coûts de maintenance. Comme dans les voitures électriques, la motorisation électrique permet des accélérations très rapides, ce qui permet de décoller rapidement, que le décollage soit vertical ou horizontal sur une piste.
L’énergie qui alimente les moteurs électriques provient de batteries classiques (Lithium-Ion en général), de piles à combustibles (encore rare) ou d’une turbine à gaz couplée à un générateur électrique, et éventuellement à des batteries servant de buffer.
La densité énergétique des batteries limite fortement l’autonomie et la charge utile de tous les drones, et a fortiori des drones de passagers. Elle est généralement inférieure à une quinzaine de minutes ce qui les cantonne à des trajets assez courts. Pour obtenir une plus grande autonomie, il faut passer à une propulsion hybride intégrant une turbine à gaz.
Ce schéma provenant de Siemens décrit bien les différents types de propulsion des avions électriques : pur avec batteries alimentant des moteurs électriques et moteurs, ou hybrides. Voir Siemens eAircraftDisrupting the way you will fly!, 2018 (58 pages).

D’autres sources documentent bien le sujet comme Aircraft Electrical Propulsion – The Next Chapter of Aviation?, de Roland Berger 2018 (32 pages). Roland Berger est un cabinet de conseil allemand qui a d’ailleurs un bureau à Paris où Axelle Lemaire, ancienne Secrétaire d’Etat au Numérique, est partner en charge de TerraNumerata, la plateforme d’innovation ouverte du cabinet. Roland Berger s’intéresse aux avions électriques, ne serait-ce que parce que deux belles startups du secteur, Lilium et Volocopter sont originaires de ce pays. Cette étude porte sur les technologies de propulsion et sur la question de l’autonomie en fonction du moyen de propulsion. Il met en avant le besoin de faire progresser la densité énergétique pour permettre l’usage d’avions 100% électriques. Une autre étude, The Future of Vertical Mobility Sizing the market for passenger, inspection, and goods services until 2035, de Porsche Consulting, 2018 (36 pages), concerne plutôt la dimension écosystème et économique des avions et hélicoptères électriques. Bref, nous avons là trois études d’origine allemande ! Ce n’est pas par hasard.
Le modèle d’hybridation le plus courant et le plus léger est l’usage d’une turbine à gaz qui alimente un générateur électrique qui alimente à son tour plusieurs moteurs électriques. En effet, la densité énergétique du kérosène est d’environ 16 fois celles des meilleures batteries électriques du moment. On peut utiliser du biokérosène produit à partir de biomasse et d’éthanol, mais dilué en faible proportion dans du kérosène issu de la distillation du pétrole.
Il est aussi possible de remplacer les batteries par des piles à combustible utilisant de l’hydrogène solide ou liquide, ce qui améliore la densité énergétique. Mais c’est plus compliqué à embarquer et à sécuriser. C’est une option retenue par quelques constructeurs automobiles comme Toyota. La production d’hydrogène pour ces piles à combustible requiert toujours une énergie primaire, qui pourrait éventuellement être renouvelable (solaire photovoltaïque, éolien).
Au CES 2019, j’avais d’ailleurs découvert ProLogium (Taïwan), une société qui propose des batteries Lithium avec un électrolyte à base de céramique. L’ensemble est censé fournir une densité énergétique double de celle des batteries Lithium-Ion classiques. Ces batteries ciblent aussi bien le marché automobile qu’aérien.

Bruit
L’un des bénéfices de la motorisation électrique est la réduction du bruit. Cela vient de plusieurs caractéristiques : les hélices des drones et avions électriques sont souvent carénées, elles gèrent moins de pièces mobiles et il n’y a pas d’arbres de transmission. Par contre, les hélices peuvent être nombreuses, jusqu’à une douzaine, parfois arrangées par paires contrarotatives, dans les drones hélicoptères et encore plus pour les avions électriques à décollage vertical du type Lilium.
La réduction du bruit est même valable avec une propulsion hybride. Cela a l’air d’être lié à l’intégration de la turbine à gaz dans la carlingue, qui fait moins de bruit qu’une turbine d’hélicoptère qui sert aussi à la propulsion horizontale par émission de gaz chauds, un réacteur ou un turbopropulseur d’avion à hélices comme dans un ATR-42 ou ATR-72.
Pollution
La motorisation électrique pollue moins au niveau de l’utilisation, ce qui renforce l’intérêt de l’usage dans les villes. Le bilan CO2 complet de l’aéronef dépendra cependant de la source d’énergie primaire qui alimentera ses batteries ou sa turbine à gaz dans le cas de l’usage d’une turbine à gaz. Elle se calculera à la tonne de CO2 consommée par passager transporté au kilomètre.
Mais même dans le cas d’une propulsion hybride, la pollution est théoriquement réduite du fait du meilleur rendement des moteurs électriques et à leur plus grande simplicité mécanique.
Mais la comparaison ne devra pas se faire qu’avec d’autres moyens de transport aérien. Elle devrait intégrer les moyens de transport terrestre, notamment le rail, quand ce n’est pas les Hyperloops si l’on se place loin dans le futur.
Maintenance
La motorisation électrique réduit fortement la complexité mécanique des engins et donc leur maintenance. C’est surtout valable lorsque les hélices ne sont pas orientables. Dans ce dernier cas, le système d’attache et de rotation des hélices deviendra un point faible de la structure des aéronefs et un souci de maintenance. Et il faut prévoir un graissage régulier dès que l’on utilise des pièces rotatives.
Questions en suspens
Poursuivons par les réserves que l’on peut émettre vis à vis de cette catégorie de transport, certaines pouvant sérieusement impacter leur développement commercial à grande échelle.
Autonomie
L’autonomie des drones de passagers est étroitement liée à la densité énergétique des batteries pour ceux qui se passent de turbines à gaz. Elle se compte en minutes, plutôt entre 10 et 20 en général. C’est peu. Cela limite la portée des trajets. Comme la vitesse de ces engins est souvent limitée à une enveloppe comprise entre 100 et 200 km/h, cela donne des portées en trajet simple de 25 à 50 km en moyenne. Sachant qu’après chaque trajet, il faut recharger ou remplacer les batteries pour pouvoir redécoller. La majorité des drones de passagers en projets n’ont pas l’air d’avoir prévu cette dernière option.
Avec une turbine à gaz, l’autonomie peut atteindre celle d’hélicoptères traditionnels, soit de l’ordre de l’heure voire plus. Des avions hybrides à propulsion électrique pourront atteindre l’autonomie de court-courriers pour des vols d’environ 500 à 1000 km de distance. Mais ces avions de quelques passagers nécessiteront des pistes traditionnelles d’aéroports.
Usages
Les drones de passagers, surtout alimentés par batterie, ont une autonomie réduite. Cela limite donc leurs trajets à de courtes escapades de quelques dizaines de kilomètres. Cela correspond à un besoin bien connu, celui du trajet entre le centre et la périphérie de villes et les aéroports où aux liaisons entre zones urbaines proches les unes des autres. Les drones ne détrôneront cependant pas les transports terrestres comme nous le verrons plus loin.
L’équation opérationnelle et économique de ces drones risque de les cantonner à une clientèle fortunée. Ils respecteront une loi marketing bien connue : les gens qui ont de l’argent n’ont pas de temps et sont prêts à payer pour gagner du temps, et ceux qui sont moins fortunés sont souvent amenés à perdre du temps qu’ils ne peuvent pas gagner. Un peu comme prendre un charter au départ de Beauvais pour partir en vacances à partir de la région parisienne !
Les drones peuvent aussi servir à desservir des zones inaccessibles par des moyens de transport traditionnels (un peu comme les hydravions près des grands lacs aux USA ou au Canada) ou servir aux secours (ambulance aérienne, évacuations après catastrophes naturelles, …).
Infrastructures
L’usage de drones de passagers pour le transport à partir des villes suppose que des infrastructures y soient mises en place. Il faut donc trouver du foncier avec des terrains relativement dégagés pour accueillir un ou plusieurs drones.
Le nombre de drones pouvant être accueilli conditionnera la capacité de trafic des points d’accès. Avec un seul “slot” de décollage, le débit serait limité à quelques passagers par décollage. Ces décollages devront être suffisamment espacés pour faciliter la régulation aérienne et éviter les croisements de drones. Tout cela réduira d’autant le débit des installations.
Ci-dessous, une vue d’artiste de l’Allemand Lilium d’aéroport installé sur le toit d’un immeuble. Le projet oublie quelque peu que les héliports sur les toits d’immeubles ont été abandonnés depuis des décennies, notamment à New York. Il n’est pas évident que la propulsion électrique change la donne en termes de précautions côté sécurité et confort sonore pour les riverains.

De plus, leur densité sera faible et un trajet ville-aéroport sera toujours multimodal, nécessitant de faire appel à un transport routier (véhicule personnel ou VTC) pour atteindre le point de décollage des drones.
Contrôle aérien
Le contrôle aérien devra évoluer pour prendre en compte ces drones. Dans une phase de démarrage, ils seront à pilotage humain. Puis le pilotage deviendra automatique et sera régulé de manière centralisée.
On commence donc à se demander quel sera le nombre d’aéronefs supportés par l’espace aérien, comment les couloirs aériens seront organisés pour ces drones, quel sera leur espacement dans ces couloirs, le cadencement des départs et des arrivées et les itinéraires et zones de délestage. Il faudra aussi tenir compte des intempéries. Les drones seront-ils à même de voler sous la pluie et dans des conditions supportées aujourd’hui par les hélicoptères et les avions ? A vrai dire, je n’en sais rien.
Sécurité
L’une des questions clés posées par ces aéronefs est leur sécurité en cas d’accident. Comment faire en sorte de sauver la vie des passagers en cas de panne ?
Les dispositifs de sécurité imaginés sont variés avec des parachutes pour la carlingue, mais qui ne peuvent se déployer qu’à une certaine altitude (environ 150 m). D’autres procédés sont voisins de ceux des voitures : des sièges durcis, un carlingue absorbant les chocs et même des airbags. Certains imaginent même des fusées permettant de réduire la vitesse lors d’une chute, comme dans A Complete Zero/Zero Safety System for eVTOL’s, mars 2018 (ci-dessous).

Financement
Si un milliard de dollars auraient été investis dans ces différents projets d’aéronefs électriques, la majorité n’ont pas obtenu de financement permettant d’aller au-delà du modèle en CAO. Pour commencer à fabriquer un prototype, il faut disposer de quelques millions d’Euros et pour les équiper entièrement, notamment côté avionique et motorisation puis gérer des vols d’essais, il semble qu’il faille disposer de quelques dizaines de millions de dollars.
Seuls une poignée de projets ont été financés aux alentours de $100M, comme Lilium, Joby et Kitty Hawk. Les cycles de mise au point semblent toujours aussi long qu’il y a plusieurs décennies, si ce n’est plus longs.
Une solution pour avancer consiste pour les projets à se faire financer par de grands industriels de l’aviation commerciale comme Airbus ou Boeing. L’autre solution consiste à financer les prototypes par les deniers publics militaires comme la DARPA aux USA. De tous les projets de drones de passagers que j’ai pu examiner, très peu d’entre eux sont financés par les budgets militaires.
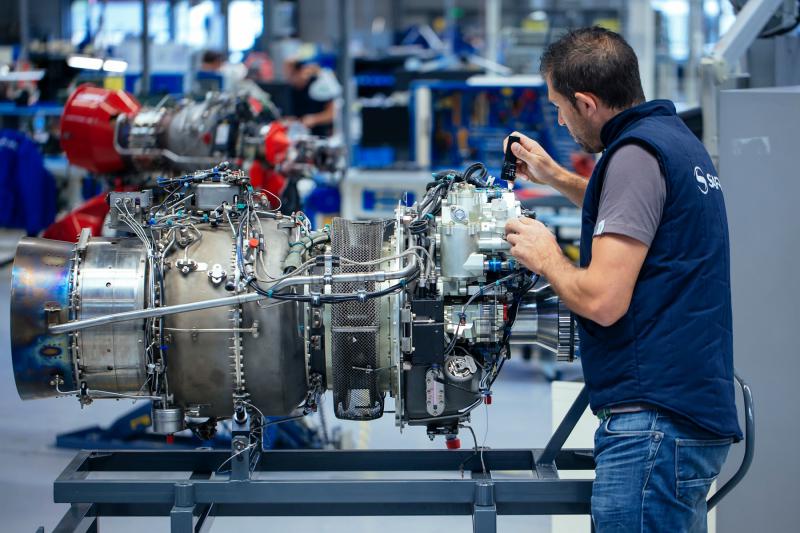
Dans toute bulle émergent des vendeurs de pelles et de pioches. Ici, ce sont les fournisseurs de plateformes clés : les moteurs, les batteries, les systèmes de pilotage (comme ceux de Thalès) et les turbines à gaz (comme Safran, ci-dessous, une Ardigen qui doit équiper les avions électriques hybrides de Zunum Aero).
La startup française Faraday Aerospace ambitionne pour sa part de fournir des systèmes de propulsion électriques complets certifiés (source). Elle s’appuie sur une expérience acquise dans la création de prototypes, comme divers avions électriques réalisés pour Airbus. Cette industrie a en effet besoin de plateformes mutualisant les efforts de R&D sur les composants clés des aéronefs et de leur exploitation.
Modèle économique
L’équation économique des drones de passagers n’est pas encore bien claire. Certains modèles sont préannoncés avec des prix de vente de quelques centaines de milliers d’Euros voire moins. Mais le coût de leurs opérations devra intégrer de nombreuses composantes : celui d’infrastructures dédiées, l’énergie qui les alimente, le personnel au sol, etc. Les modèles économiques à analyser de près sont ceux des opérateurs de transport qui exploiteront ces drones. Il faut que leur investissement soit rentable.
Il nécessitera la mise en place d’infrastructures, au moins au début, pour une clientèle fortunée et limitée. Il n’est d’ailleurs pas surprenant qu’Uber soit positionné derrière plusieurs des projets de drones de passagers. Comme avec les véhicules autonomes développés notamment en partenariat avec Volvo, ils préparent le futur en ne négligeant aucune option.
A noter que le marché des hélicoptères est actuellement situé autour de $20B par an (20 milliards de dollars) avec environ 60% dans le militaire et 40% dans le civil.
TRL
Un bon nombre de ces drones de passagers ne sont évidemment que des projets très éloignés de la commercialisation. Nous avons là une longue gradation dans le stade d’avancement des projets qui reprend la notion de TRL (“Technology Readiness Level”) :
(1) Un plan papier ou une maquette virtuelle en CAO. Comme celle de Terrafugia qui prétend que sa voiture volante TF-X sera commercialisée dans un mois (en septembre 2018, vidéo) et qui ne vole toujours pas en vrai. Et aussi le S2 de Joby (vidéo) ou le Trifan 600 de XTI Aircraft.

(2) Une maquette non fonctionnelle. C’est le cas du Bell Helicopter Nexus vu au CES ou du Pop-Up d’Airbus présenté à VivaTech en mai 2018 (vidéo). Il est développé en partenariat avec Audi.

(3) Un modèle réduit qui vole, partiellement ou totalement fonctionnel comme le Elytron (vidéo).

(4) Un prototype en taille réelle qui vole sans passager. C’est le cas du Volocopter (vidéo), du Lilium (vidéo), du Vahana d’Airbus (vidéo), du Cora de Kitty Hawk (vidéo) et du Ava (vidéo).

(5) Un prototype complet qui vole avec un passager. C’est le cas du 184 de eHang (vidéo), du Surefly (vidéo) et du Hoverbike S3 testé à Dubaï (vidéo). Ce sont le plus souvent des vols de démonstration sur de courtes distances ou à faible altitude. Aucun de ces prototypes n’a réalisé de vol permettant une exploitation commerciale.

(6) Un modèle de série qui a passé les tests de certification. Ce serait le cas du Kity Hawk Flyer mais, s’il vole bien (vidéo), n’a pas l’air d’être encore fabriqué en série. Kitty Hawk est une startup américaine financée par Larry Page, le cofondateur de Google. Et les usages de cet engin semblent limités : un seul passager, plutôt adapté aux plans d’eau et avec une autonomie réduite.
(7) Enfin, un modèle en exploitation. Je n’en ai pas trouvé qui soient dans ces deux dernières catégories. La majorité des projets les plus avancés sont entre l’étape (3) et (4). Ils sont très rares en phase 5 et au-delà.
Si nombre de projets de drones de passagers en sont encore au stade de la planche à dessin ou du prototype ne volant pas encore, il n’existe pas d’obstacles scientifiques ou technologiques majeurs qui empêcheraient ces divers drones de voler et de transporter des passagers. Je dis cela en comparaison des incertitudes scientifiques et technologiques qui entourent l’ordinateur quantique. Tout est relatif !
Les écueils technologiques sont assez classiques dans le secteur aérien : fragilité des structures et des éléments mobiles des aéronefs, stabilité du vol stationnaire et facilité de pilotage, qu’il soit manuel ou automatique. Depuis plus d’un siècle, les inventeurs de tout poil du transport aérien ont traversé les mêmes aventures et mésaventures qui ont cloué au sol nombre de projets.
Choix politiques
Une fois ces points technologiques traités, le gros des obstacles à lever sont alors plutôt opérationnels, financiers, environnementaux, économiques et politiques. A chaque fois que vous entendrez parler de voitures volantes, de drones de passagers ou d’avions électriques, il faudra les évaluer avec un regard à 360° !
In fine, le déploiement de ces drones impliquera des choix politiques structurants. Ce sont les villes qui décideront d’installer des héliports pour ces drones. Elles devront le faire dans le cadre de plans de transports urbains intégrés et en liaison intermodales avec d’autres moyens de transports : aéroports, gares de trains à grande vitesse, etc. Les villes devront faire des choix économiques qui bénéficient au maximum de leurs citoyens et pas seulement à une élite de cadres et entrepreneurs fortunés et pressés.


Si on prend le cas de la région parisienne, n’oublions pas les lacunes du financement de la maintenance des infrastructures RER et métro existantes qui conduisent à des pannes à répétition et perturbent le service jour après jour. Les tramways et les bus électriques seront probablement plus stratégiques dans les villes que les drones de passagers car leur débit est bien plus grand. On parle ainsi de “mass transit” aux USA. La logique de volume doit primer sur toute logique élitiste.
Ces considérations politiques expliquent indirectement pourquoi derrière nombre de projets pilotes de drones de passagers se trouve la ville de Dubaï. C’est lié à son positionnement haut de gamme. Mais Dubaï ne ressemble pas aux villes européennes ou américaines ou même asiatiques. Il faut donc extrapoler son choix aux autres villes avec discernement.
![]()
![]()
![]()

Reçevez par email les alertes de parution de nouveaux articles :
![]()
![]()
![]()


























 Articles
Articles
La bulle
Excellent article. Il faudrait peut-être inventer une course digne de “Ces merveilleux fous volants dans de drôles de machines !” financée par un Xprize et qui aurait lieu à Dubaï pour désigner le futur leader de ce marché. Ne pas sous estimer non plus le problème de la confiance des passagers à surmonter…
A Must Read! Vous avez apprécié le compte-rendu du CES2019 écrit par (@olivez) alors ne ratez pas cette nouvelle le… https://t.co/v22glg58kv